Scenario Generation for Validating Artificial Intelligence Based Autonomous Vehicles
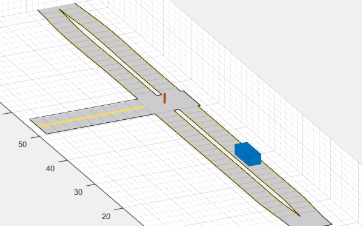 Road based on Taltech test path
Road based on Taltech test pathAbstract
The progress in the development of artificial intelligence engines has been driving the autonomous vehicle technology, which is projected to be a significant market disruptor for various industries. For the public acceptance though, the autonomous vehicles must be proven to be reliable and their functionalities must be thoroughly validated. This is essential for improving the public trust for these vehicles and creating a communication medium between the manufacturers and the regulation authorities. Existing testing methods fall short of this goal and provide no clear certification scheme for autonomous vehicles. In this paper, we present a simulation scenario generation methodology with pseudo-random test generation and edge scenario discovery capabilities for testing autonomous vehicles. The validation framework separates the validation concerns and divides the testing scheme into several phases accordingly. The method uses a semantic language to generate scenarios with a particular focus on the validation of autonomous vehicle decisions, independent of environmental factors.