Abstract Scenario Generation for AV Validation in MATLAB
 MATLAB AD Scenario
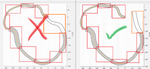
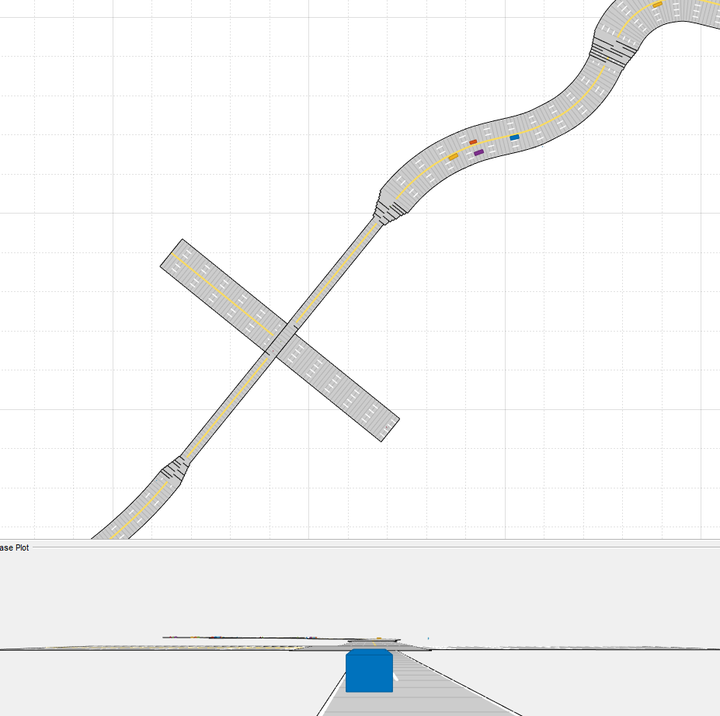
MATLAB AD ScenarioDemonstrating a scenario generation framework to demo the subject of my thesis: the Methodology for Autonomous Vehicle Verificaiton & Validation in Simulation (MAVVVS). This methodology aims to use constrained pseudo-random generation to generate scenarios in a highly abstracted environment to test the AV’s decision making. Runtime Verification methods are used to identify edge cases and validate the vehicles decisions, and random walks are used to overcome bias in testing.
Publications
Development of a Validation Regime for an Autonomous Campus Shuttle
A validation regime using simulation for TalTech’s AV development.

Generation of Autonomous Vehicle Validation Scenarios Using Crash Data
Generating scenarios based on an analysis of the crash history of AVs.